Dwi Kurniawan, Imron
Rosyadi,S.T.,M.Sc, Azis
Wisnu Widhi N,S.T.,M.Eng
Program Studi Teknik Elektro, Fakultas
Sains dan Teknik, Universitas Jenderal Soedirman
Jl.Mayjend Sungkono KM 05 Blater Purbalingga Indonesia
|
Abstract—One
of the efforts in mitigating landslides are periodic monitoring of soil movement. It is possible if there is a device
that have abillity
to measuring ground displacement. H48C accelerometer is a device that capable of measuring dynamic and
static acceleration so that it is possible to measure the displacement of the
soil material. Problem in the design of ground displacement measurement
system is a field that is generally located on the slopes of hills or mountains. Manufacture of wireline system will
certainly have limitations in terms of flexibility and
portability. Wireless Sensor Networks (WSN) is one solution to these
problems. Transfer data on WSN can use the XBee RF module using ZigBee
communication network.
I. Pendahuluan
Komponen utama dalam
perancangan JSN untuk pengukuran pergerakan tanah terdiri dari unit sensor, dan
unit komunikasi. Unit sensor tersusun oleh akselerometer yang digunakan untuk
mengukur perpinahan material tanah. Untuk unit komunikasi tersusun oleh modul
Xbee sehingga transfer data antar node
dapat dilakukan secara wireless.
Selain unit sensor dan unit komunikasi terdapat juga unit Real Time Clock (RTC) sebagai unit yang mengatur pewaktuan
pengiriman data.
Perpindahan posisi material
tanah dapat dideteksi menggunakan sensor akselerometer H48C dengan melakukan
integrasi berganda pada data percepatan yang didapat dari akselerometer. Data
yang diperoleh dari akselerometer mengandung noise sehingga diperlukan pemfilteran data. Filter yang digunakan
merupakan filter digital Low Pass Filter (LPF)
dan menggunakan prototype filter Bessel.
II.
Perancangan
Sistem
A. Arsitektur JSN
JSN
yang dirancang menggunakan topologi star (gambar
1) dengan menggunakan 2 unit router dan 1 unit gateway. Router bertugas untuk malakukan akuisisi data pergerakan tanah secara periodik
kemudian mengirimkanya ke gateway.
Sedangkan gateway bertugas menerima
data yang dikirim oleh router dan
mengirimkanya kembali ke-server.

Gambar 1 . Arsitektur JSN
B. Metode Akuisisi Data Percepatan

Gambar 2. Akselerometer H48C
 (1)
(1)
Dimana :
g =
Percepatan
Axis = Tegangan keluaran tiap sumbu
Vr = Tegangan referensi
ADC
Posisi sumbu untuk akselerometer H48C ditunjukan
oleh gambar 2.
II.
Hasil dan
Pembahasan
A. Karakteristik H48C
Pada akselerometer H48C
pengukuran statik dilakukan ketika sensor tidak mendapat gaya dari luar
melainkan hanya gaya gravitasi. Pada pengukuran statik ini akan menghasilkan data
yang merepresentasikan posisi sensor relatif terhadap permukaan bumi. Sehingga
dapat diperoleh sudut roll (φ), pitch(ρ), dan theta(θ).

Gambar 3. Sudut φ,ρ,θ dalam representasi 2D
Pembentukan masing – masing
sudut φ, ρ, θ ditunjukan oleh gambar 2 sedangkan hasil pembacaan masing –
masing sudut ditunjukan oleh gambar 3.

a

b
Gambar 4. Pembacaan sudut φ (a) dan ρ (b) dimana Ax =
percepatan sumbu X, Ay = percepatan sumbu Y, dan Az = percepatan sumbu Z
Pada pengukuran dinamik
diperoleh data percepatan pergerakan sensor. Percepatan dinamik ini merepresentasikan adanya
pengaruh gaya dari luar yang menyebabkan sensor berpindah posisi. Untuk menguji
percepatan dinamik dilakukan dengan menggeser posisi sensor pada masing –
masing sumbu.
Arah pergerakan sensor
ditunjukan oleh grafik percepatan yang terbentuk. Pergerakan pada arah positif
diawali dengan sebuah bukit dan diakhiri dengan lembah sedangkan arah
pergerakan negatif dimulai dengan sebuah lembah dan diakhiri dengan sebuah
bukit. Gambar 4 menunjukan perbedaan grafik percepatan yang terbentuk pada
pergerakan kearah positif dan arah negatif.

Gambar 4. Perbedaan
grafik percepatan yang terbentuk pada arah pergerakan positif ( kiri) dan arah
pergerakan negatif (kanan)
Gambar 5 menunjukan hasil yang didapat dari
akselerometer pada pergerakan di sumbu x sejauh 10 cm, 20 cm, 30 cm, 40 cm dan
50 cm.

Gambar 5. Data percepatan pada pergerakan sumbu x
B.
Pengukuran
Perpindahan Modul
Untuk mendapatkan perpindahan posisi dilakukan proses integrasi berganda
pada data percepatan yang didapat dari akselerometer. Integrasi pertama akan
menghasilkan data kecepatan. Persamaan (2) merupakan persamaan integrasi untuk
memperoleh data kecepatan pada sampel ke-n. Sedangkan untuk memperoleh data
perpindahan posisi setelah sampel ke – n digunakan persamaan (3).
 (2)
(2) (3)
(3)
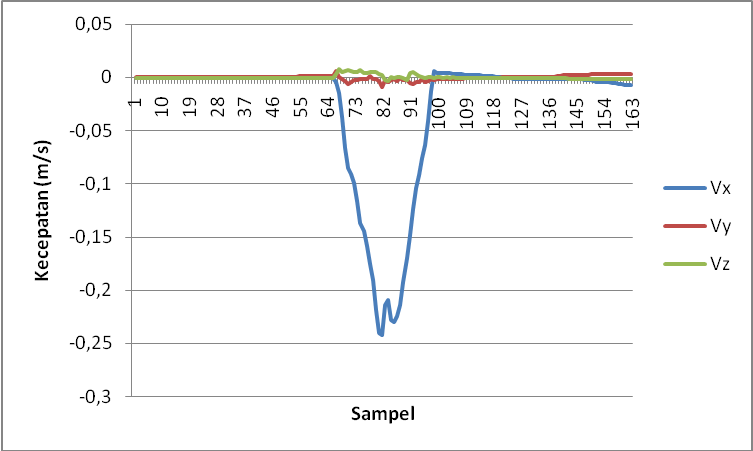
Gambar 6 menunjukan grafik yang diperoleh dari
data percepatan, kecepatan dan perpindahan.

a
b

c
Gambar 6. (a) grafik
percepatan, (b) grafik kecepatan dan (c) grafik perpindahan
C.
Low Pass
Filter Bessel
Data dari akselerometer masih terdapat banyak noise
sehingga diperlukan filter.
Data percepatan dari
akselerometer merupakan sinyal yang informasinya direpresentasikan dalam runtun
waktu diskret. Sehingga dipilih filter IIR (Infinite Impulse Response) dan
prototype filter analog yang dipilih adalah LPF Bessel Filter.
Langkah selanjutnya adalah
menentukan parameter – parameter fiter yaitu frekuensi sampling, frekuensi cutt
off, dan orde filter.
Pengambilan data akselerometer
dalam 1 detik sebanyak 125 data sehingga frekuensi sampling adalah 125 Hz,
sedangkan frekuensi cutt off dibuat 5 Hz.
Respon frekuensi dari filter
digital adalah pada [0,1] sedangkan 1 merepresentasikan π yang merupakan frekuensi Nyquist sehingga π
= 62.5 Hz. Frekuensi cutt off dari filter digital adalah ωc = fc / fs = 0.04
rad/s.
Untuk mencari koefisien rekursi dari fungsi
alih filter yang akan dibuat pada pengujian ini dilakukan dengan menggunakan
program filter helper yang tersedia
pada website http://www-users.cs.york.ac.uk/~fisher/mkfilter
dengan memasukan parameter frekuensi sampling, frekuensi cut off (corner frequency)
dan orde filter.
Penentuaan orde filter
dilakukan dengan cara membandingkan nilai rMSE(root Mean Square Error) dari data perpindahan yang didapat dari
respon masing-masing filter dari orde 1 hingga orde 10. Filter dengan
performansi terbaik yang dipilih.
Hasil pengujian orde filter
terhadap pergerakan sensor pada sumbu x sejauh 30 cm ditunjukan oleh gambar 7.

Gambar 7. Nilai rMSE pada tiap orde
 (4)
(4)
Dengan a dan b adalah koefisien
rekursi dengan nilai masing – masing sebagai berikut:
b0
= 1
b1
= 10 a1
= -0.0217
b2
= 45 a2 = 0.3013
b3
= 120 a3 = -1.8999
b4
= 210 a4 = 7.1766
b5
= 252 a5 = -17.9970
b6
= 210 a6 = 31.3335
b7
= 120 a7 = -38.3927
b8
= 45 a8
= 32.7257
b9
= 10 a9 = -18.5945
b10= 1 a10= 6.3684
Perbandingan data percepatan sebelum
dan sesudah difilter ditunjukan oleh gambar 8. Tampak perbedaan yang mencolok
antara data sebelum difilter dengan data setelah difilter.

a

b
8. Perbandingan data percepatan sebelum difilter (a)
dengan setelah difilter (b)
D. Unit Komunikasi
Unit komunikasi memanfaatkan
modul RF Xbee Pro series 1. Modul diset dalam mode API dengan
format frame data yang digunakan sebagai berikut:

Pewaktuan pengiriman data
diatur oleh unit RTC yang memanfaatkan DS1307. Pengiriman data diatur pada
selang waktu 5 detik.
III. Pengujian Sistem
A.
Pengujian
Akselerometer
Tabel 1.
Pengujian Akselerometer Pada Tiap Sumbu
Jarak (cm)
|
X
|
Y
|
Z
|
|||
Terukur
|
Error
|
Terukur
|
Error
|
Terukur
|
Error
|
|
10
|
11.02
|
1.02
|
11.24
|
1.24
|
11.75
|
1.75
|
20
|
20.03
|
0.03
|
20.94
|
0.94
|
20.79
|
0.79
|
30
|
33.75
|
3.75
|
31.99
|
1.99
|
32.29
|
2.29
|
40
|
45.08
|
5.08
|
43.09
|
3.09
|
42.71
|
2.71
|
50
|
54.10
|
4.10
|
51.95
|
1.95
|
53.18
|
3.18
|
-10
|
-9.61
|
0.39
|
-10.43
|
0.43
|
-11.45
|
1.45
|
-20
|
-19.70
|
0.30
|
-21.81
|
1.81
|
-21.80
|
1.80
|
-30
|
-31.79
|
1.79
|
-30.41
|
0.41
|
-29.56
|
0.44
|
-40
|
-43.04
|
3.04
|
-42.74
|
2.74
|
-39.92
|
0.08
|
-50
|
-50.10
|
0.10
|
-54.22
|
4.22
|
-53.10
|
3.10
|
Error rata - rata
|
1.96
|
1.88
|
1.76
|
|||
Tabel 2. Cross Axis Effect Pergerakan
Pada Tiap Sumbu
Jarak (cm)
|
Pergeseran di X
|
Pergeseran di Y
|
Pergeseran di Z
|
|||
Y
|
Z
|
X
|
Z
|
X
|
Y
|
|
10
|
-1.19
|
-5.47
|
0.45
|
-0.16
|
1.90
|
3.63
|
20
|
-0.55
|
-2.17
|
-0.87
|
-1.00
|
-0.33
|
1.83
|
30
|
-4.81
|
-4.69
|
2.67
|
-1.63
|
6.17
|
2.16
|
40
|
-0.21
|
-3.45
|
4.04
|
-3.50
|
3.94
|
1.39
|
50
|
3.22
|
-6.91
|
2.52
|
0.62
|
5.34
|
2.74
|
-10
|
-0.53
|
-1.45
|
0.85
|
0.15
|
-1.34
|
-0.31
|
-20
|
-0.68
|
-2.64
|
-2.61
|
-0.53
|
-3.52
|
-1.69
|
-30
|
-2.64
|
-1.03
|
-0.47
|
1.84
|
-1.55
|
-0.97
|
-40
|
1.07
|
-2.79
|
-2.35
|
2.69
|
5.64
|
-0.33
|
-50
|
-3.19
|
-4.78
|
-5.65
|
3.01
|
3.03
|
-5.66
|
Tabel 1 menunjukan hasil pengujian pergerakan pada tiap sumbu. Error rata – rata
yang didapat adalah sebesar 1.96 cm pada pergerakan di sumbu X, 1.88 cm pada
pergerakan di sumbu Y dan 1.76 cm pada pergerakan di sumbu Z.
Tabel 2 menunjukan nilai cross axis effect yang terjadi
akibat pergerakan pada satu sumbu. Nilai tertinggi dari cross axis effect
adalah 6.91 cm.
B.
Pengujian
RSSI (Recieve Signal Stength)
Untuk pengujian RSSI dilakukan
dengan dua metode yaitu Pengujian RSSI pada dalam kondisi Line Of Sight (LOS) dan pengujian RSSI pada medan berpenghalang.
Untuk pengujian LOS dilakukan di pantai Widarapayung kecamatan Binangun
Kabupaten Cilacap. Sedangkan untuk pengujian berpenghalang dilakukan didaerah
pesisir pantai Widarapayung yang mana daerah ini merupakan perkebunan kelapa
dengan semak dan perdu dibagian dasar tanahnya.
Hasil pengujian LOS ditunjukan
oleh gambar 9 dengan pengambilan data dilakukan tiap 20 m dari jarak 20 m
hingga 500 m.
Pengujian pada daerah
berpenghalang dilakukan pada tiap 10 m dari jarak 10 m hingga 140 m. Hasil
pengujian ditunjukan pada gambar 10.

Gambar 9. Grafik RSSI pada modul
pada hubungan secara LOS

Gambar 10. Grafik RSSI pada medan berpenghalang
C.
Pengujian
Konsumsi Daya
Pada pengukuran digunakan catu
daya berupa 2 buah sel baterai Lithium Polimer dengan tegangan masing – masing
3.6 V dengan kapasitas 2600 mAH dan disusun seri sehingga tegangan catu daya
keseluruhan adalah 7.2 V.
Pengukuran dilakukan pada
modul yang sedang menjalankan program router dan mengirimkan data melalui modul
RF ke gateway dengan interval pengiriman data 5 detik.
Hasil yang didapat dari
pengukuran ditunjukan pada tabel 3 dibawah.
Tabel 3. Pengukuran Konsumsi Arus
Unit
|
Arus
|
Kontroler (
Arduino)
|
20 mA
|
RF ( Xbee Pro )
|
62 mA
|
RTC ( DS1307 )
|
2 mA
|
Akselerometer (
H48C )
|
1 mA
|
Arus Total
|
85 mA
|
Dengan arus total 85 mA dan
tegangan kerja adalah 7.2 V sehingga konsumsi daya modul adalah 612 mW. Dengan
kapasitas baterai 2600 mAH idealnya baterai dapat mensuplai modul selama 30.5
jam akan tetapi pada kenyataanya dapat bervariasi.
Jika menggunakan baterai
sebagai catu daya modul, kapasitas baterai sangat menentukan lamanya waktu
kerja modul. Sehingga untuk membuat modul bekerja lebih lama dapat dilakukan
dengan beberapa cara seperti menambah kapasitas baterai, meminimalisir kerja
kontroler, serta memperpanjang jeda waktu pengiriman data.
IV.
Kesimpulan
dan Saran
A.
Kesimpulan
Akselerometer dapat digunakan
untuk melakukan pengukuran data perpindahan sehingga dapat diaplikasikan untuk
melakukan pengukuran pergerakan material tanah. Data dari akselerometer masih
terdapat banyak noise sehingga
diperlukan pemfilteran data.
Setelah menggunakan filter Bessel orde 10, kesalahan rata – rata
pengukuran sebesar 1.96 cm untuk sumbu x, 1.88 cm untuk sumbu y dan 1.76 cm
untuk sumbu z.
Pada pengujian komunikasi data
pada kondisi LOS, modul RF masih dapat mlakukan komunikasi pada jarak 500 m
hanya saja nilai RSSI nya sudah melemah hingga -97 dBm.
B.
Saran
Penggunaan akselerometer untuk
pengukuran percepatan dinamis masih terdapat nilai percepatan yang dipengaruhi
oleh pecepatan gravitasi sehingga diperlukan tambahan sensor untuk memberikan koreksi kemiringan
sensor, ini
dapat dilakukan dengan menambahkan gyro.
Daftar Pustaka
[1] A.E Putra. 2009. Embeded System
Menggunakan Mikrokonroler dan Pemrograman C. Andi : Yogyakarta
[2] ATMEL Corp. 2003. Atmega8 And Atmega8L Preliminery. ATMEL
Corporation : Parkay
[3] BNPBa. 2012. Rekapitulasi
Kejadian Bencana Tahun 2011 di Indonesia . http://www.bnpb.go.id/website/asp/benc.asp?p=11 diakses pada: Kamis 29 Maret 2011.
[4] BNPBb. 2007.
Pengenalan Karakteristik Bencana dan Upaya Mitigasinya di Indonesia edisi III.
Direktorat Mitigasi : Jakarta
[5] Digi Manual. 2008. Xbee Znet 2.5 / Xbee PRO Znet 2.5 OEM RF
Modules. Digi International Inc : United States
[6] Ergen , S.C. 2004. ZigBee/IEEE802.15.4 Summary . http://www.sinemergen.com/academic/publications/zigbee.pdf
diakses tanggal 8 November 2011.
[7]
Faludi, Robert. 2010. Buliding Wireless Sensor Network.
O’Reilly : United States
[8]
Hill, Jasson Lester. 2003. System Architecture Of Wireless Sensor
Network. University Of California : Berkeley
[9]
I.F Akyidiz dan Mehmet Can
Vuran. 2010. Wireless Sensor Network. Wiley:
United Kingdom
Slots & Casino Site - Lucky Club
BalasHapusExperience 카지노사이트luckclub our range of online casino games, including Slots, Roulette, Blackjack, Baccarat, Roulette and more at Lucky Club. Come join the fun and excitement